由于深度学习在计算机视觉领域得到了非常好的效果,做上下料机器人的自然也会尝试把 DL 用到上下料机器人的物体识别中。
首先,对于物体识别,这个就可以照搬 DL 的研究成果了,各种 CNN 拿过来用就好了。在 2016 年的『亚马逊抓取大赛』中,很多队伍都采用了 DL 作为物体识别算法。
然而, 在这个比赛中,虽然很多人采用 DL 进行物体识别,但在物体位姿估计方面都还是使用比较简单、或者传统的算法。似乎并未广泛采用 DL。这里一般是采用 semantic segmentation network 在彩色图像上进行物体分割,之后,将分割出的部分点云与物体 3D 模型进行 ICP 匹配。
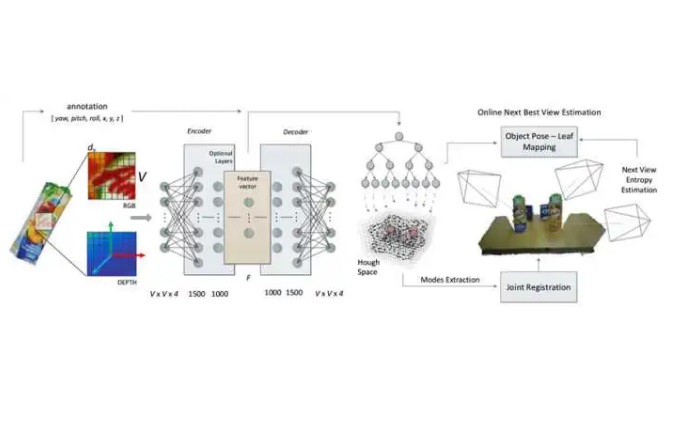
当然,直接用神经网络做位姿估计的工作也是有的,如这篇:
Doumanoglou, Andreas, et al. "Recovering 6d object pose and predicting next-best-view in the crowd." Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2016.
它的方法大概是这样:对于一个物体,取很多小块 RGB-D 数据(只关心一个patch,用局部特征可以应对遮挡);每小块有一个坐标(相对于物体坐标系);然后,首先用一个自编码器对数据进行降维;之后,用将降维后的特征用于训练Hough Forest。