上下料机器人在轴操作运动时,所使用的上下料机器人用户坐标系号在使用“坐标”键选择“用户坐标系”后,会显示在示教器屏幕上,即为当前上下料机器人用户坐标系号;当前上下料机器人用户坐标系号不同,,按轴运动键后的运动方向会不同;当前上下料机器人用户坐标系号不同,运动上下料机器人后添加运动指令记录的位置点信息(姿态值)会不同。
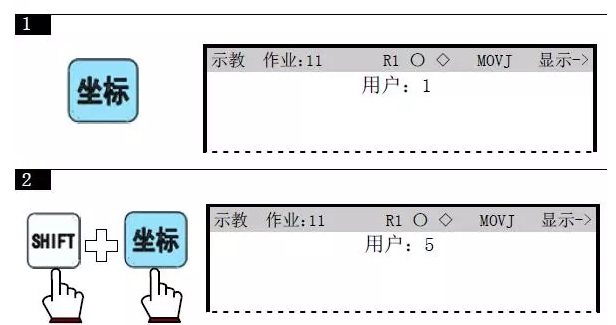
使用上下料机器人用户坐标系运动机器人前,先要选择当前使用的用户坐标系号。如果新标定、设定一个用户坐标系,按退出后,当前用户坐标系号立刻更改成标定、设定完成的用户坐标系号;如果要使用已经标定、设定过的用户坐标系,用[坐标]键选择坐标系为用户坐标系,按[SHIFT]+[坐标]键选择坐标系号。
(网图,侵删)
备注:每按一次,用户坐标系号增加1,增加到8 后,返回到1 继续循环。