上下料机器人本体的设计已经日趋成熟,也有很多本体厂家开始关注上下料机器人其他方面的用户体验,例如机身管线包。机身管线包的设计需要结合应用中上下料机器人本身的空间轨迹,也要简约、稳定、有余量。所以很多设计者在做机身管线包设计的时候,经常也会遇到难题,加之目前机器人管线包价格不菲,浪费过多是所有人不乐意所见。
ABB工业机器人仿真软件给出了管线包的仿真功能,这让应用者有更高的容错率。下面简单介绍一下该功能。
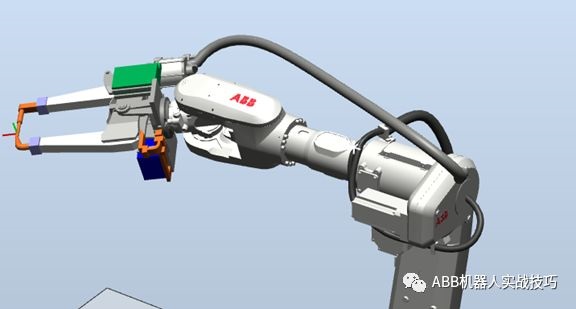
1)Robotstudio在6.05开始推出hose(管线包)的仿真,如下图的ABB机器人自定义管线
2)建模-电缆
3)根据提示,添加起点和终点
4)再添加中间控制点
5)完成后创建