在我们了解怎么设置上下料机器人的WAN口IP时,我们需要知道,上下料机器人其实是工业机器人的一种应用功能,即用机器人进行上下料的工作。这种工作有很多的延展性,例如配合机器视觉对摆放凌乱的产品进行调整姿态后的上料,又或是对下料的产品进行码垛、分拣、装盒等。
功能性的应用就需要与其他设备进行配合,目前上下料机器人与其他设备间的通讯,主要还是采用工业以太网。工业以太网本身就涉及到了IP地址的设定,下面就说说,ABB上下料机器人是怎么通过软件设置WAN口的IP的。
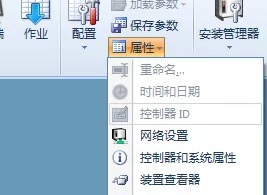
1. 首先,我们需要Robotstudio软件,并连接上机器人,控制器tab下,点击下图,找到网络设置
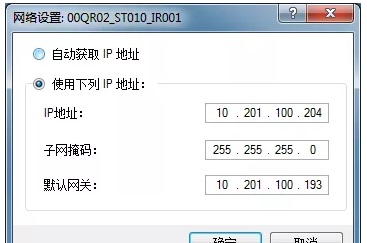
2. 根据需要设置ip如下,设置的为WAN口ip。
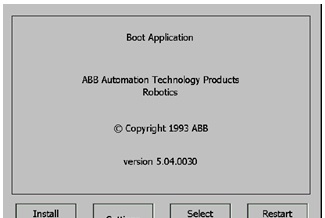
3. 也可选择机器人重启-高级-启动引导界面,重启后到下图,进入settings设置wan口ip
以上就是设置上下料机器人的WAN口IP方法。