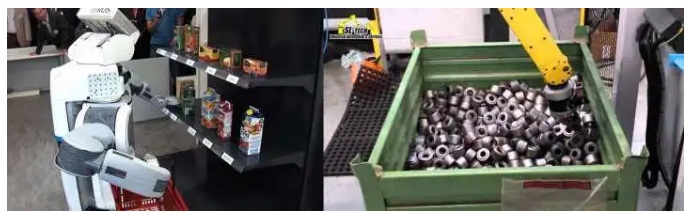
这是目前工业流水线上最常见的场景。目前来看,这一领域对视觉的要求是:快速、精确、稳定。所以,一般是采用最简单的边缘提取+边缘匹配/形状匹配的方法;而且,为了提高稳定性、一般会通过主要打光源、采用反差大的背景等手段,减少系统变量。
目前,很多智能相机(如cognex)都直接内嵌了这些功能;而且,物体一般都是放置在一个平面上,相机只需计算物体的(x,y,θ)T 三自由度位姿即可。
另外,这种应用场景一般都是用于处理一种特定工件,相当于只有位姿估计,而没有物体识别。
当然,工业上追求稳定性无可非议,但是随着生产自动化的要求越来越高,以及服务类机器人的兴起。对更复杂物体的完整位姿(x,y,z,rx,ry,rz)T 估计也就成了机器视觉的研究热点。